Das Roboterprojekt "Bartimäus" - Fußball mal anders
Worum geht es hier?
Um Roboterfußball. Genauer: Um kleine, mobile und voll autonome Roboter, welche auf speziellen Spielfeldern gegeneinander antreten und versuchen, den Ball in das Tor ihres Gegenübers zu befördern. Bartimäus ist einer von ihnen.Geplant und gebaut wurde er ab Dezember 2006 vom RFC (RoboterFußballClub) Aschersleben, 2008 trat er dann erstmalig im RoboCup Junior in den Ligen "1 on 1" und "2 on 2 Secondary" an. Unterstützt wurde dieses Vorhaben insbesondere durch die Leiton GmbH aus Berlin, welche für unser Team die Platinen der Hauptelektronik fertigte und uns auch während des gesamten Entwicklungsprozesses mit gutem Rat und ermutigenden Worten zur Seite stand.
Die folgenden Zeilen sollen einen kleinen Überblick über das oft schon zur Sportart avancierte Hobby Roboterfußball im Allgemeinen und die Geschichte des Roboterprojektes Bartimäus im Besonderen geben. Vielleicht fühlt sich danach ja der eine oder andere Leser motiviert, selbst in diese Thematik einzusteigen - Nachwuchs ist stets gern gesehen!
Roboterfußball - Was ist das eigentlich?
 Nun - Roboterfußball ist viel. Wie jeder Sport ist es zunächst einmal natürlich eine Leidenschaft, es ist pure Begeisterung, überschwängliche Freude und auch Spaß am Spiel. Aber Roboterfußball ist noch viel mehr - es ist die wohl technisch innovativste Sportart überhaupt, ein Feld der Entwicklung und des Einsatzes der weltweit neuesten Technologien.
Nun - Roboterfußball ist viel. Wie jeder Sport ist es zunächst einmal natürlich eine Leidenschaft, es ist pure Begeisterung, überschwängliche Freude und auch Spaß am Spiel. Aber Roboterfußball ist noch viel mehr - es ist die wohl technisch innovativste Sportart überhaupt, ein Feld der Entwicklung und des Einsatzes der weltweit neuesten Technologien.
Der internationale Dachverband dieser Sportart, die Federation of International Robot-Soccer Association, definiert das Ziel wie folgt: "By 2050, develop a team of fully autonomous humanoid robots that can win against the human world champion team in soccer." Zu deutsch: "Bis 2050 soll ein Team vollständig autonomer humanoider Roboter entwickelt werden, welches gegen die amtierenden menschlichen Fußballweltmeister gewinnen kann."
Um dieses Ziel zu fördern und zu erreichen, werden jährlich unzählige Wettbewerbe mit Robotern ausgetragen. Die mit Abstand wichtigsten davon sind die Offenen Meisterschaften im RoboCup, etwa die German Open in Deutschland. Auf diesen qualifizieren sich die besten Teams eines jeden Landes für die Weltmeisterschaft, deren Austragungsort regelmäßig wechselt. Gespielt wird in etlichen Ligen, von der "Junior Soccer Primary", in welcher sogar schon Grundschüler diesem interessanten Hobby nachgehen können, bis hin zur "Middle Size" und der "Humanoid League", in denen professionelle Mannschaften großer Universitäten ihre Konstruktionen gegeneinander antreten lassen.
Bartimäus - Die Geschichte eines Roboters
An dieser Stelle könnten wir anfangen, stundenlang über alle technischen Feinheiten und Entwicklungsabschnitte zu schreiben, die unserer Roboter in den letzten 16 Monaten durchlaufen hat. Aber das wäre inzwischen so viel Material, dass man dafür bald eine eigene Projekthomepage einrichten könnte, daher beschränken wir uns in der Beschreibung auf die wichtigsten Komponenten. Doch warum fragen wir Bartimäus nicht am besten einmal selbst, wie er sich vorstellen würde?... ;-)
Für die technisch interessierten Bastler sollte dies für's Erste einen kleinen Einblick gegeben haben, doch auch für die weniger in der Materie stehenden Leser wollen wir hier Bilder lieber mehr als tausend Worte sagen lassen. Daher haben wir die Entwicklung unseres Roboters einfach kurz in den folgenden Grafiken zusammengefasst, beginnend mit dem allerersten Pappmodell, welches nach einigen Stunden des Grübelns und Denkens entstand und kurz darauf zu einem ersten Prototypen aus Acrylglas führte:
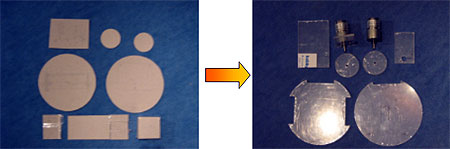
Das Ergebnis einer kleinen Überlegung: Woraus bauen wir unseren Robo? Andere Teams verwenden Sperrholz oder Acrylglas... also los! Es folgten ein Besuch im Baumarkt, zwei Tage intensive Bastelarbeit und vor allem die Erkenntnis, dass dieses Material doch nicht so geeignet ist, wie wir dachten... die Teile rissen und sprangen mehr, als wir sie zusammenbekamen. Und wirklich gut verkleben ließen sie sich auch nicht. Aber am Ende hielt's doch:
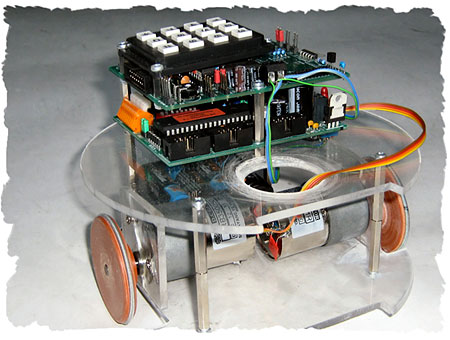
Diese erste Version hatte aus finanziellen Gründen noch kein Display (siehe oben, neben der Tastatur), keine Sensorik und nur zwei RB35 Getriebemotoren. Aber sie lief erst mal... die Basis bildete hier noch ein ATMega32, welcher aufgrund seiner unzureichenden Ressourcen in späteren Versionen zum Co-Prozessor umfunktioniert wurde und letztendlich aus Gründen des Platz- und Energiemangels ganz weichen musste. Heute verrichtet er seinen Dienst in einem kleinen Kettenroboter, welcher uns als Testplattform für neue Elektronikkomponenten dient. Ach ja: Die zwei kleinen "Zacken" an der Vorderseite waren ursprünglich als Ballführung gedacht, wurden aber später durch eine tauglichere Version mit einer flach parabelförmigen Ausbuchtung ersetzt.
Einige Wochen nach dem Bau dieses ersten Prototypen sahen wir uns auf den Qualifikationsturnieren und der German Open 2007 um, wo wir etliche neue Ideen und Konzepte aufgriffen, die in die nächste Version unseres Roboters mit einflossen. Zu diesem Zeitpunkt intensivierten wir auch unsere Suche nach Sponsoren, denn so ein Roboter ist kein billiges Spielzeug... :-)
Somit brauchte es also einige Zeit, bevor die Entwicklung endlich ernsthafte Fortschritte machte, doch im Juli 2007 war es so weit: Bartimäus 2.0 stand vor uns und fuhr seine ersten Zentimeter. Zu verdanken haben wir dies übrigens auch nicht zuletzt der Leiton GmbH, welche uns hier erstmalig mit der Fertigung unserer selbst entwickelten Steuerelektronik unterstützte - ein großes Dankeschön hierfür! Der wesentlichste Punkt unserer neuen Konstruktion war aber ein verbessertes Chassis aus GFK-Platten, welches einerseits mechanisch sehr belastbar ist, andererseits aber durch seine Flexibilität auch bei heftigen Kollisionen nicht zu Bruch geht. Zudem ist dieses Material enorm leicht, auch im heimischen Keller gut zu bearbeiten und elektrisch leitfähig - ein Punkt, welcher später bei der Bekämpfung von Störeinflüssen auf die Elektronik noch eine wichtige Rolle spielen sollte.
Die folgenden Monate zogen sich wieder arg hin. Mal fehlte es am Geld, dann wieder an der Zeit oder die Lieferung irgendwelcher wichtiger Teile verzögerte sich teils wochenlang, weswegen es nie so vorwärts ging, wie wir es gerne gehabt hätten. Und die Qualifikationsturniere rückten beständig näher... Um Weihnachten 2007 herum war dann jedoch endlich wieder ein neuer Stand erreicht, den zu zeigen sich auch lohnte: Der Co-Prozessor existierte nicht länger, der Kompass und die Ultraschallsensoren waren geliefert und wurden ausführlich getestet und zwei schöne neue Mikromotoren der Firma Faulhaber mit vorgespanntem Planetengetriebe verrichteten ihre Arbeit - doppelte Kraft und vierfache Geschwindigkeit bei nur halbem Energieverbrauch. Auch die neuen Spezialakkus, welche extra angefertigt werden mussten und für die sich lange Zeit kein passendes Ladegerät finden ließ, saßen jetzt sicher im hinteren Teil der Mechanikebene. Mittels eines Magneten konnte unser Robo nun schon sehr ansehnliche Tore schießen, aber finden konnte er den Ball noch nicht...
Im Laufe der Zeit und insbesondere durch den Wegfall des Co-Prozessors hatten sich einige elektronische Notwendigkeiten ergeben, die nun eine weitere Platine erforderten. Zweckmäßiger Weise sollte diese auch gleich noch die Infrarotsensoren vom Typ SFh409FA samt ihrer Vorschaltungen tragen, aber der liebe Platz machte uns mal wieder das Leben schwer... am Ende kamen wir mit Lochrasteraufbauten und Selbstätzversuchen doch nicht weiter und es musste dringend wieder eine richtige Platine her. Wir hatten Glück und bekamen von der Leiton GmbH schöner Weise auch diesmal wieder professionelle Hilfe.
 Ende Januar hatten wir dann also endlich eine perfekt funktionierende Ballerkennung am Laufen, der Kompass zeigte uns die Richtung zum gegnerischen Tor und unser Kicker landete präzise Treffer. Nur der Ultraschall machte uns weiter sorgen... aber noch bevor der richtig lief, waren wir erst einmal bei einem Testspiel in Magdeburg, um die neue Elektronik und den Dribbler zu testen.
Ende Januar hatten wir dann also endlich eine perfekt funktionierende Ballerkennung am Laufen, der Kompass zeigte uns die Richtung zum gegnerischen Tor und unser Kicker landete präzise Treffer. Nur der Ultraschall machte uns weiter sorgen... aber noch bevor der richtig lief, waren wir erst einmal bei einem Testspiel in Magdeburg, um die neue Elektronik und den Dribbler zu testen.
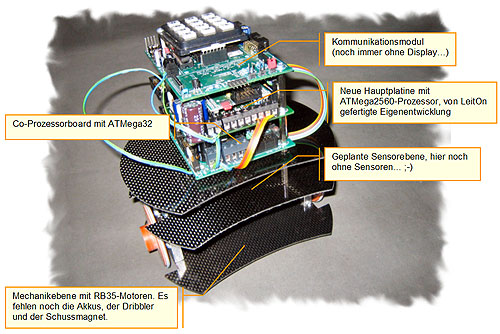
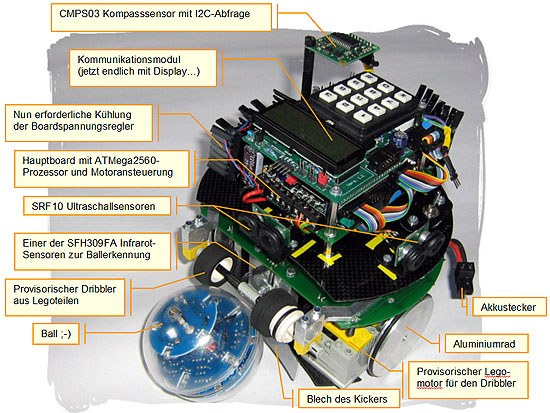
Hier gut zu sehen ist die breite Dribblerwalze (rot) welche durch schnelle Rotation den Ball hält und die viele hinzugekommene Sensorik. Die grüne Platine oberhalb der neuen Aluminium-Räder trägt die Ballerkennung und Zusatzelektronik und ist, da sie eine der GFK-Platten ersetzt, auch ein essenzieller Bestandteil der mechanischen Grundkonstruktion. Die kleinen "Augen" oberhalb des Dribblers stellen den vorderen Ultraschallsensor (Typ SRF10) dar, dahinter sieht man (leider etwas verschwommen) die Verkabelung der vielen neuen Bauteile. Oben auf sitzt inzwischen auch ein Display, darüber befindet sich noch an einem kleinen Abstandsbolzen der Kompasssensor.
Mit den Erfahrungen, die wir bei diesen Testspielen gewonnen haben, wurde in Windeseile noch eine letzte, endgültige Version des Roboters gebaut, welche dann am 29. Februar und 01./02. März am Nürburgring antrat. So musste der Dribbler samt Antrieb durch eine provisorische Legokonstruktion ersetzt werden, da die Kugellagerung ständig blockierte, die Ultraschallsensorik wurde noch einmal leicht modifiziert, um bis Spielbeginn einsatzbereit zu sein und auch an der Strategie wurden noch einige Feinarbeiten erledigt.
Dann, nach gut einem Jahr harter Arbeit und Tüftelei, war es so weit: Bartimäus musste zeigen, was er konnte. In den letzten Freundschaftsspielen am 29.02. schlug er sich noch recht gut, alle Sensoren arbeiteten zufriedenstellend und auch unsere Strategie schien aufzugehen. Am folgenden Tag sah es allerdings leider weniger gut aus: Schon das erste Spiel verloren wir haushoch und seit dem frühen Samstagmorgen kämpften wir praktisch nur mit technischen Problemen. Der Ultraschall war quasi ausgefallen, nur links konnten wir im Nahbereich noch grob schätzen, wie weit ein Hindernis entfernt war. Mehrere Infrarotsensoren waren infolge eines Crashs beschädigt worden und konnten nicht mehr rechtzeitig gewechselt werden bzw. wurden zu spät als defekt erkannt und unser Kompass hüpfte wild durch die Gegend. Wir hatten Zwei mal Norden, Süden lag in etwa da, wo Osten hätte sein sollen und Osten und Westen selbst lagen nur ca 5° voneinander entfernt irgendwo bei 7 Uhr. Nicht unbedingt optimale Voraussetzungen, um ein Spiel zu gewinnen, und so belegten wir am Ende nur einen doch etwas enttäuschenden dritten Platz innerhalb unserer Spielgruppe. Aus der Traum von der German Open und erst recht von der WM in China.
Erfolg- und nutzlos waren unsere Bemühungen aber wohl dennoch nicht: Während der über einjährigen Bauzeit, die wir in diesen Roboter gesteckt haben, lernten wir enorm viel über Elektronik und Mechanik, Programmierung und Mathematik. Wir entwickelten neue Ideen und Konzepte für ein späteres Modell und lernten Leute kennen, die genauso denken wie wir - in 0 und 1. Wir erlebten immer wieder neue Erfolge und Rückschläge und lernten, was es bedeutet, sich auf technisches Neuland zu begeben.
Aber nicht zuletzt machten wir auch die Erfahrung, dass es für jedes Problem eine Lösung gibt und der Wille Berge versetzen kann, wenn er nur stark genug ist. Wann immer wir suchten, fanden wir jemanden, der uns half, der uns etwas beibrachte, der uns etwas gab oder auslieh, der uns etwas anfertigte oder der uns einfach nur motivierte und uns sagte, wir sollen weitermachen. Und all dies zusammen war es erst, was es uns ermöglichte, dieses Projekt durchzuziehen und auch in Situationen der Niederlagen und Verzweiflung nie aufzugeben, sondern immer nach dem neuen Licht am Horizont Ausschau zu halten und letztendlich nach den Sternen zu greifen. "It is not whether you win or lose, but how much you learn that counts!", steht im letzten Punkt unserer Spielregeln im RoboCup, und so bleibt uns nur, Danke zu sagen. Danke an alle, die an diesem Projekt beteiligt waren und dank deren Unterstützung unser Traum Wirklichkeit wurde. Danke für all die Hilfe und keine Angst - es geht weiter! Die nächsten Projekte sind schon im Bau und wir haben nicht vor aufzugeben, bis wir die Sterne eines Tages auch tatsächlich erreicht haben.
Bis dann,
Bartimäus und der RFC Aschersleben
Autor: Georg Richter



