
The Robot Project "Bartimaeus" - A new Kind of Football
What's all this about?
Robot Football. Or: small, mobile and fully automatic robots competing against each other on the field. Bartimouse is one of them.Since December 2006 he has been developed by the RFC (RoboterFootballClub) Aschersleben. In 2008 he had his debuts in the RoboCup Junior League "1 on 1" and "2 on 2 Secondary". LeitOn GmbH delivered the PCBs fort he main electronics, helped with useful suggestions and provided additional motivation fort he team.
The following gives a short introduction of Robot Football.
Robot Footbal - What's that?
 Well, it is passion, fun and joy. But it is more than that. It is probably the most innovative sports on earth, involving state of the arts technology. Robot Football is never standing still.
Well, it is passion, fun and joy. But it is more than that. It is probably the most innovative sports on earth, involving state of the arts technology. Robot Football is never standing still.
The international head organization, the Federation of International Robot-Soccer Association, defines its goal as follows: "By 2050, develop a team of fully autonomous humanoid robots that can win against the human world champion team in soccer.".
To further develop this sports, many different tournaments are running year around. The most important is the RoboCup, like the German Opens. The best teams qualify for the Robot Football World Cup, which takes place in Suzhou China in 2008. Besides, there are different leagues, starting from the "Junior Soccer Primary", where even primary schools can participate. Further, in the "Middle Size" and the "Humanoid League" Universities and professionals compete in Robot Football.
Bartimouse – History of a Robot
Instead of recalling unlimited technical discussion and challenges of the last 16 months, we will focus on the main develompment stages. But how would our main character introduce himself..? ;-)
A picture tells more than words. Starting with a carton model, we first developed a prototype made of acryl:
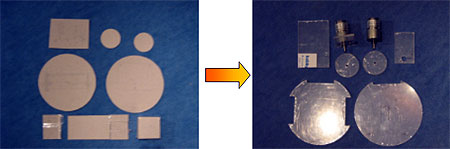
Two days of – partly troublesome - assembly and we had the result:
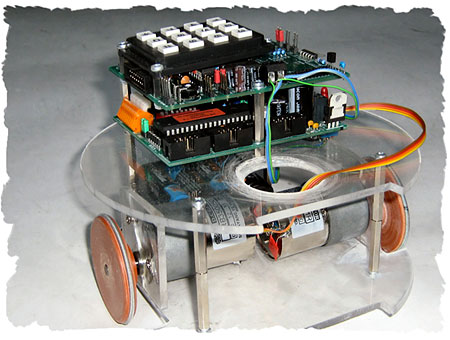
For financial reasons, this first version did not have a display yet. There were no sensors either, only two RB35 motors. But it was running. We added an ATMega32, which became the Co-Processor shortly afterwards and later was removed completely. The two „spikes“ in front were meant to guide the ball, but were later replaced by parable carvings.
Next, we visited the German Open 2007 qualifications to gather ideas. We also started contacting possible sponsors.
It took some time, but in July 2007 Bartimouse 2.0 was moving its first centimetres. One of the main improvements were the chassis (GFK plates). These are very reliable and flexible and do not break easily in collisions. It is also very light, easy to work with and its electrical conductive. The latter became an important point, when we were challenged by parasitic induction.
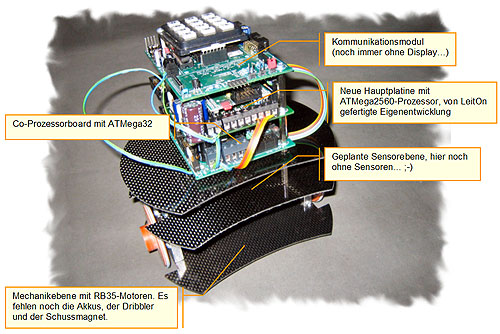
After waiting for components a new version of was ready Christmas 2007. The Co-Prozessor did not exist, the compass and the ultrasonic sensors had arrived and were tested. Two motors from Faulhaber were running Bartimouse – twice as powerful, four times faster but only half the energy consumption. Two custom made batteries were placed in the mechanic layer. By using a magnet, the robot could shoot goals now. But he could not FIND the ball yet…
Soon we needed a new PCB to carry the infra-red sensor, type SFh409FA including pre-circuits.
 End of January the „ball-finding“ worked well, and the compass guided the direction of the opponents goal. The ultra sonic made some difficulties, but never the less, we went to a test game in Magdeburg.
End of January the „ball-finding“ worked well, and the compass guided the direction of the opponents goal. The ultra sonic made some difficulties, but never the less, we went to a test game in Magdeburg.
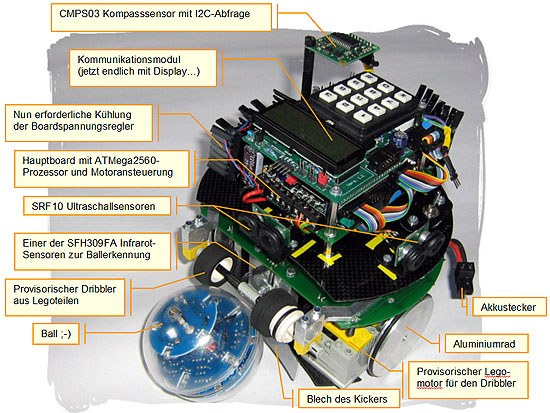
Here you can see the dribbling-roll (red) - which shoots goal by a quick rotation – plus a lot of new sensor equipment. The green PCB above the aluminium wheels carries the ball-recognition and additional electronics. The PCB replaces one of the GFK-boards and is now part of the mechanical base construction. The small „eyes“ above the „dribbler“ are the front ultra sonic sensor (type SRF10). On top you can see the display and the compass sensor.
With the latest experience from the test games we improved the robot to compete at Nuerburgring on February 29 and March 1./2. 2008. The dribbler had to be replaced by a temporary Lego-construction, because the ball bearing blocked continuously. The ultra sonic sensor was modified again too.
After a year of planning and construction we were preparing for the real matches. The first test game was all good, but it looked different the next day: the ultra sonic sensor did not work anymore, the compass mixed up north and south (east and west were only 5° separated) and a crash destroyed almost all infra red sensors. In the end we became third and had to stop dreaming of the German Opens or even the World Cup in China.
But it was worth it: During this time we all learnt a lot about mechanic, electronic, PCBs, programming and maths. We have plenty of ideas for the next version.
"It is not whether you win or lose, but how much you learn that counts!", is the last rule in the RoboCup. All we can say now is thanks to all the supporters. We will never give up and keep on trying harder next time!
Best regards,
Bartimouse and the RFC Aschersleben
Author: Georg Richter



